
つくばチャレンジ2024

ソフトウェア全体の統合,および現場でのオペレーターを担当した。
システム構成は以下のようになっている。
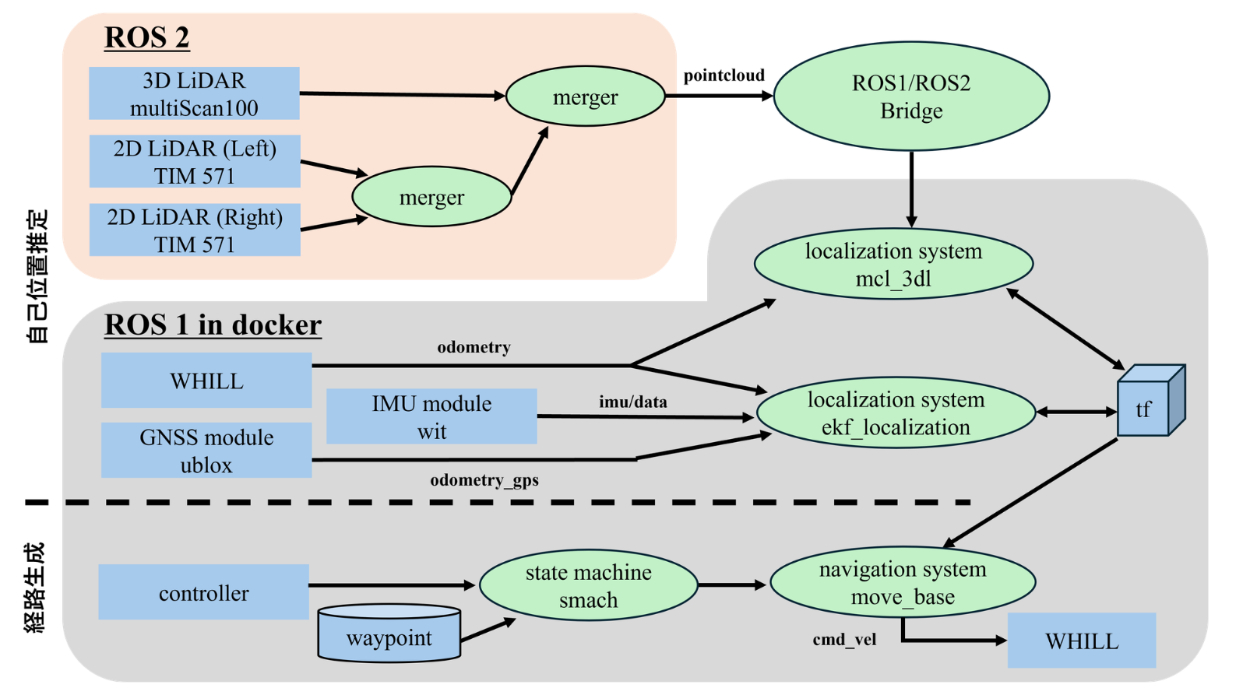
ROS2への移行を完全に行えなかったため,今まで開発していたROS1の財産をDockerとROS1/ROS2ブリッジを用いてROS2と統合している。
・実験走行の様子

ソフトウェア全体の統合,および現場でのオペレーターを担当した。
システム構成は以下のようになっている。
ROS2への移行を完全に行えなかったため,今まで開発していたROS1の財産をDockerとROS1/ROS2ブリッジを用いてROS2と統合している。
・実験走行の様子