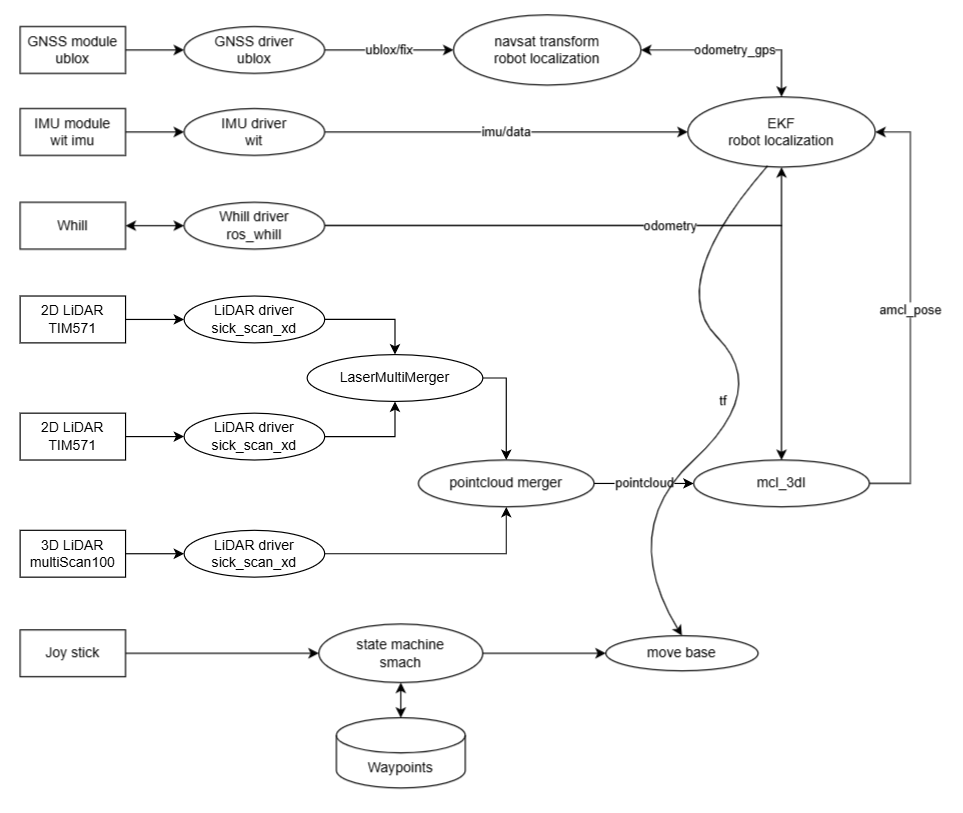
つくばチャレンジ2023 Nagayoshi Iemura 慶應義塾大学理工学研究科修士2年 以下のROSシステムにおいてMove baseという経路計画、追従、障害物回避を行うオープンソースパッケージを使用しており,実験的にパラメータ調整を行う役割を担当した。