
テオロボ

OVERVIEW
3次元cadと3Dprinterを使った初めてのロボット製作です。テオヤンセンのリンク機構という歯車のような仕組みを利用して、複雑な歩行をするロボットを製作しました。
動機
”歩く”や”座る”というmotionは、単純な動作のように見える、しかし良く考えてみると複雑で魅力的だなと思った。だから足で歩くというロボットを製作するということを通して「歩行」というmotionの再認識ができればいいなと思い作り始めた。
製作過程
1.仮作り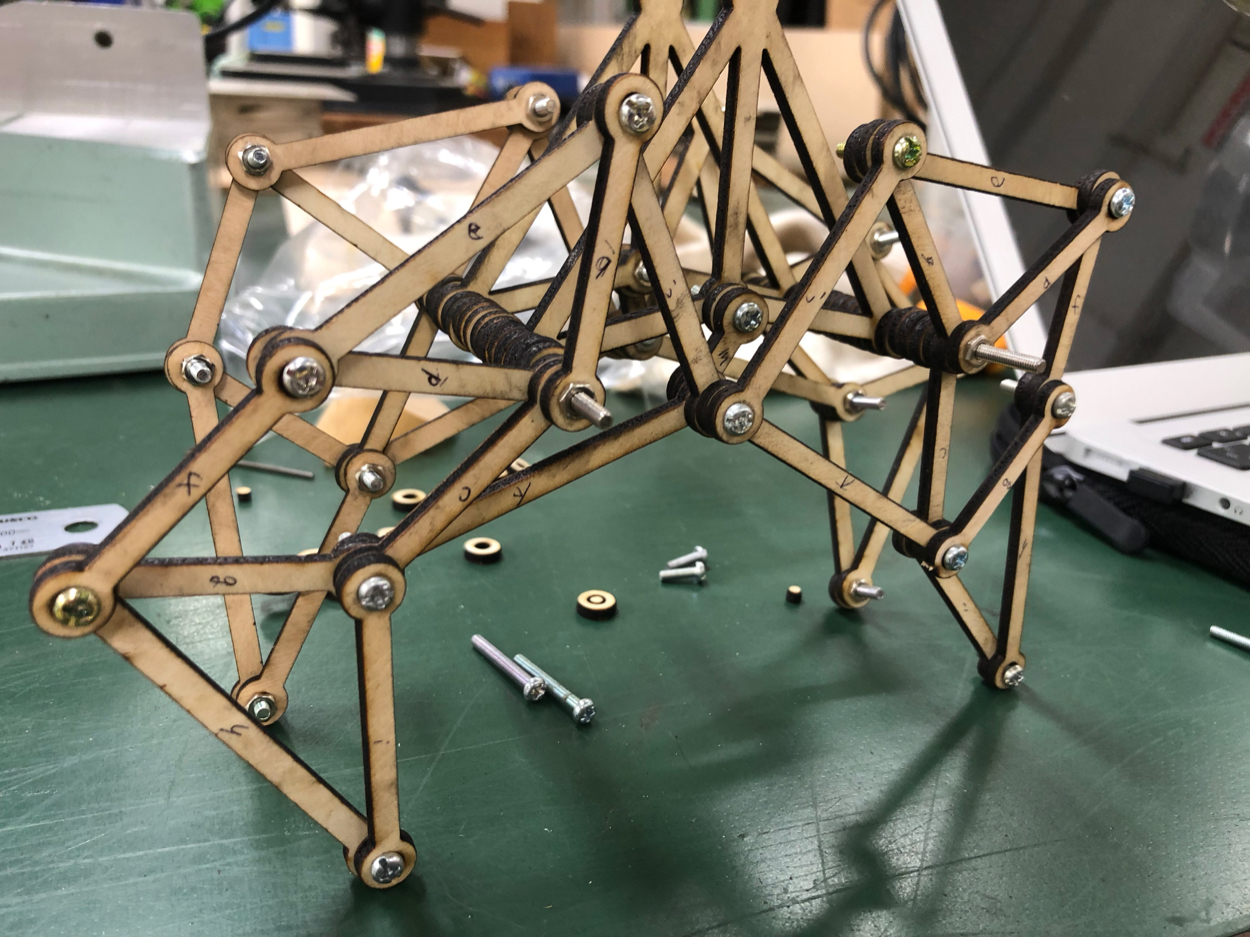 自分のテオロボのイメージを木とネジだけを使って形づくりをした。ここから可動部や全体の構造を組み立てていく。
自分のテオロボのイメージを木とネジだけを使って形づくりをした。ここから可動部や全体の構造を組み立てていく。
2.mock1
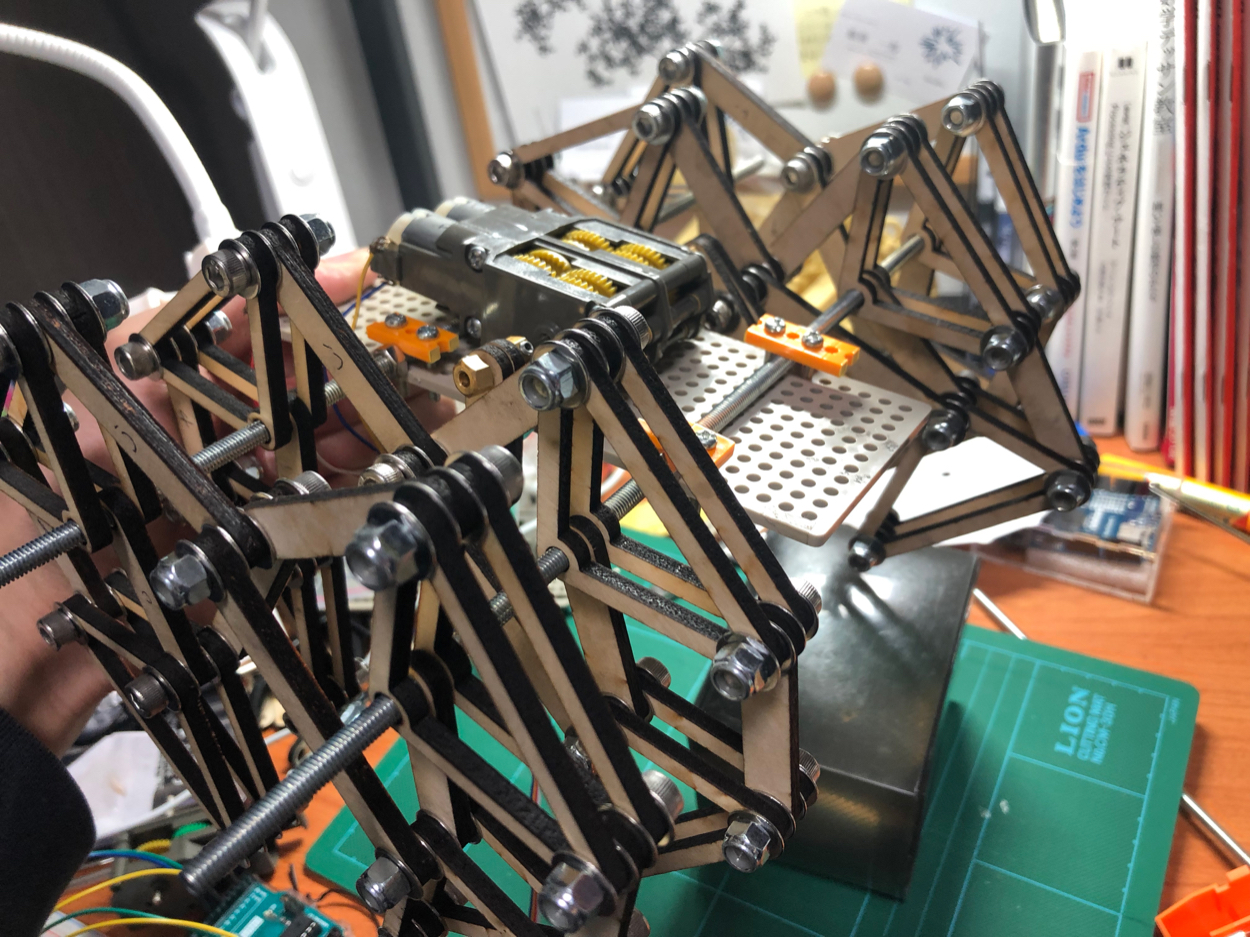
mock1を製作した。脚はMDF(3mm)、胴体はユニバーサルボードを用いた。今回の試作から、MDFでの製作の難しさと2次元的な部品の製作では限界があると感じた。
3.3Dprinterの活用とmock2の製作

2次元的な製作の限界を感じ、3Dprinterを購入した。それと同時に3次元cadを使い始め、第一mockの部品の互換品を製作し始めた。特に脚と脚の部品が3Dprinterだとかなり簡単に作ることができた。
4.mock2の完成
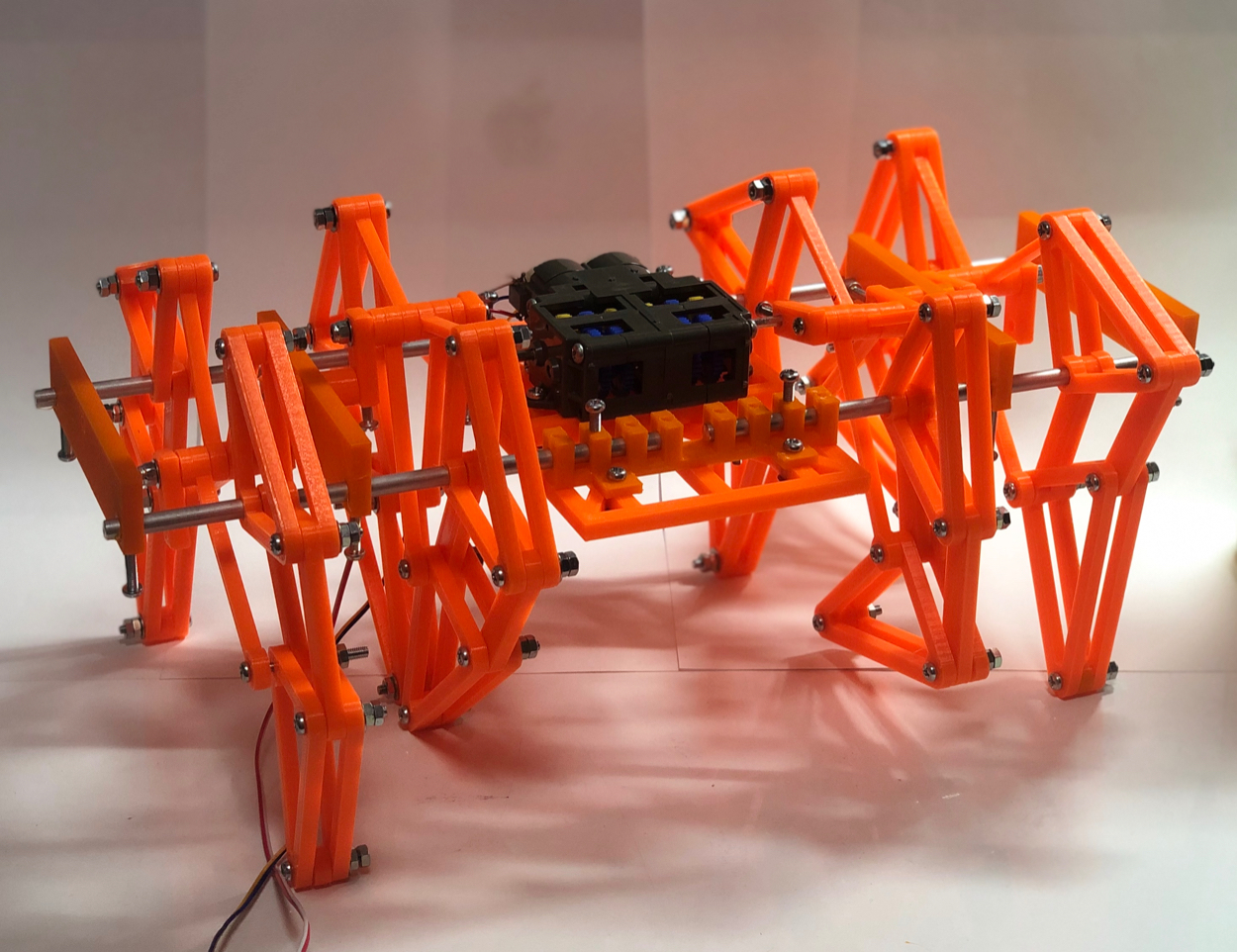
ここまで作ってみて感じたことは、一つの部品が微妙にズレているだけで上手く歩けなくなってしまうことがよくわかった。特にネジ穴の大きさ0.1mmや部品の1°歪みが大きな負荷となって、真ん中の回転を妨げる様子を見ると、歩くことは歩くことを求め、歩くために何度も挑戦的に、体の部品を上手く作り変えたヒトの努力の形なのかもしれないと思う。