

目的: 各大会での優勝
開発概要: 毎年変わるルールに合わせてロボットを作る
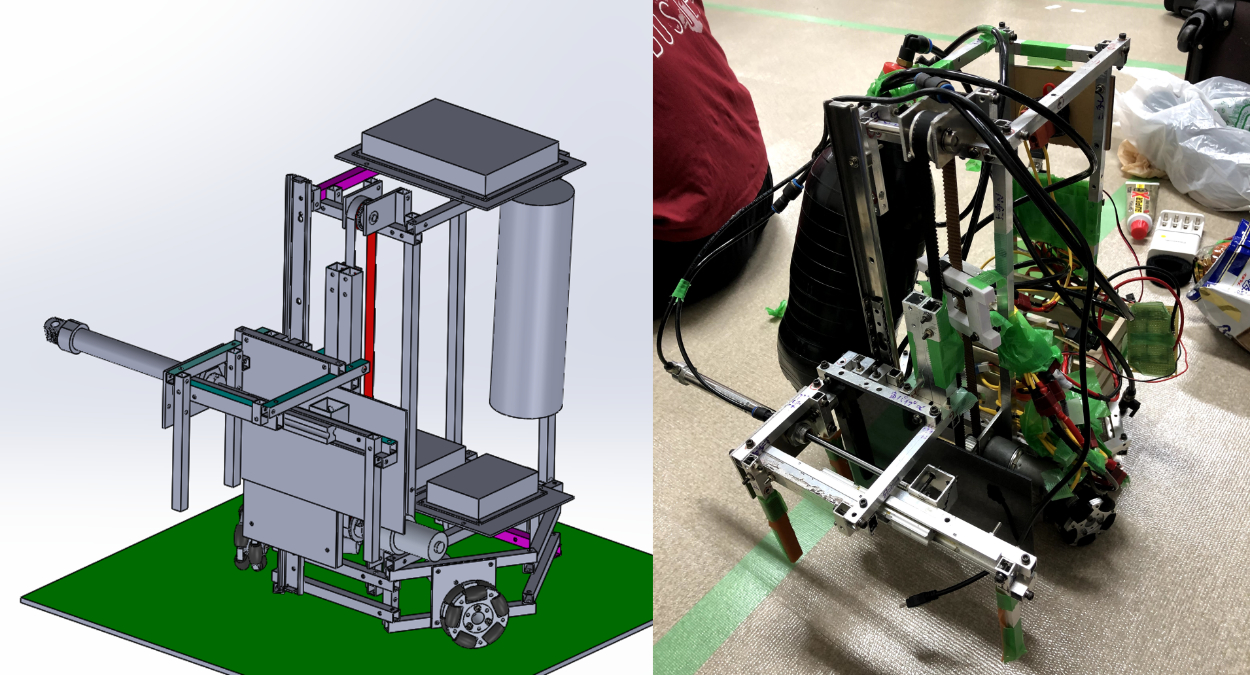
大学1年時: F3RC 2019
上半身設計(物資回収ハンド)
エアシリンダを使った把持機構。タイミングベルトによって昇降する。
昇降動作に合わせて2枚の壁が動き、把持を補助する。
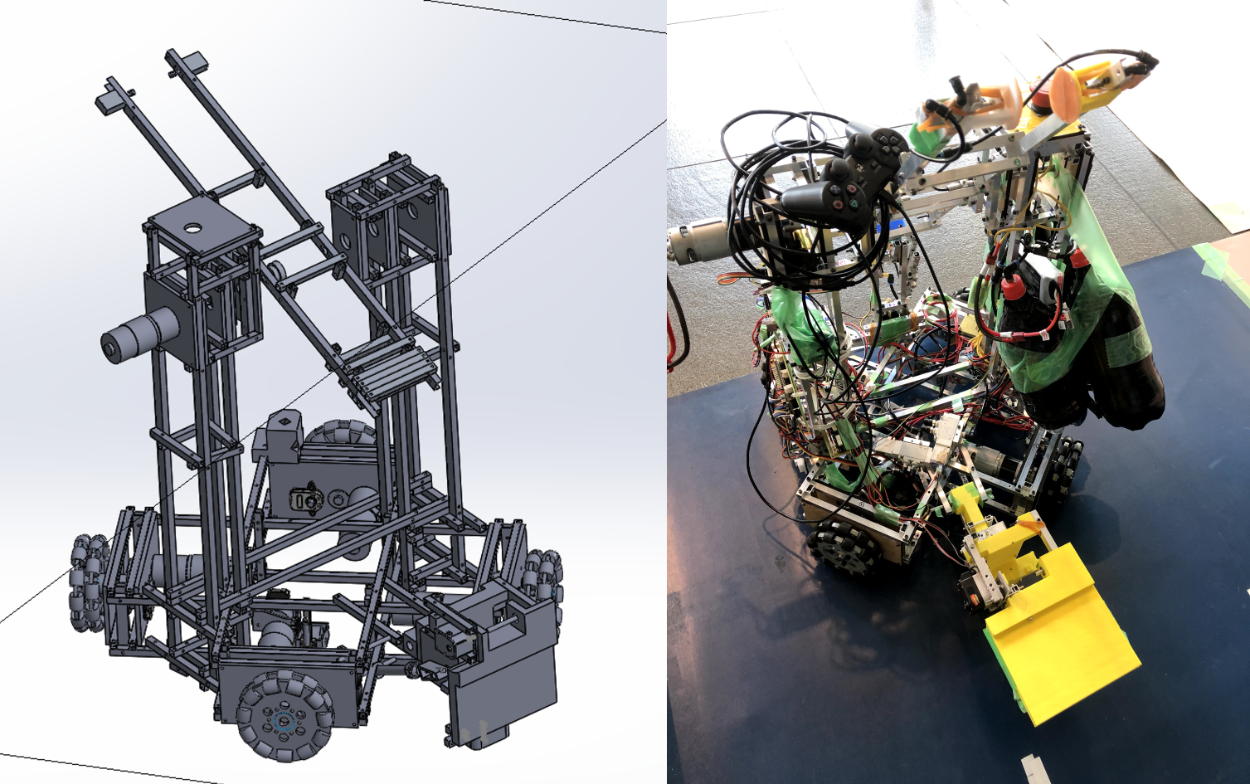
大学1年時: 関東春ロボコン2020
上半身設計(物資回収ハンド、投擲機構)+全体アセンブリ
投擲機構: モーターによって回転し、先端のミニエアシリンダで把持/開放することで投擲する。
回収ハンド: サーボモーターで駆動。ボールと箱両方に合うように設計。
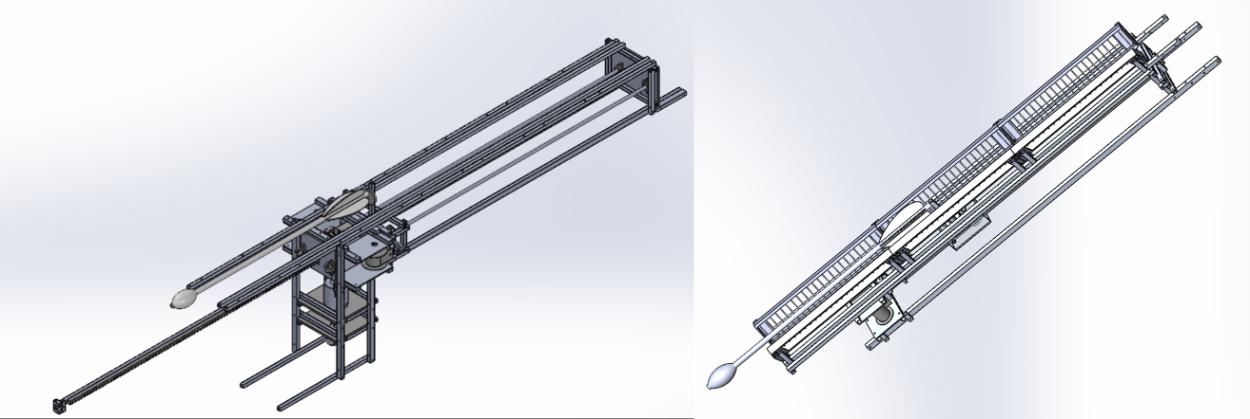
大学2~3年時: NHK学生ロボコン 2021
上半身設計(投擲機構試作)+TR全体アセンブリ+チームリーダー
投擲機構(左): モーターとラック&ピニオン、クラッチ、定荷重ばねを組み合わせたもの
投擲機構(右): モーターとクラッチ、ワイヤー、定荷重ばねを組み合わせたもの
左では重心が高すぎたため、右に変更して重心を下げた。
TR
全体設計を担当した。
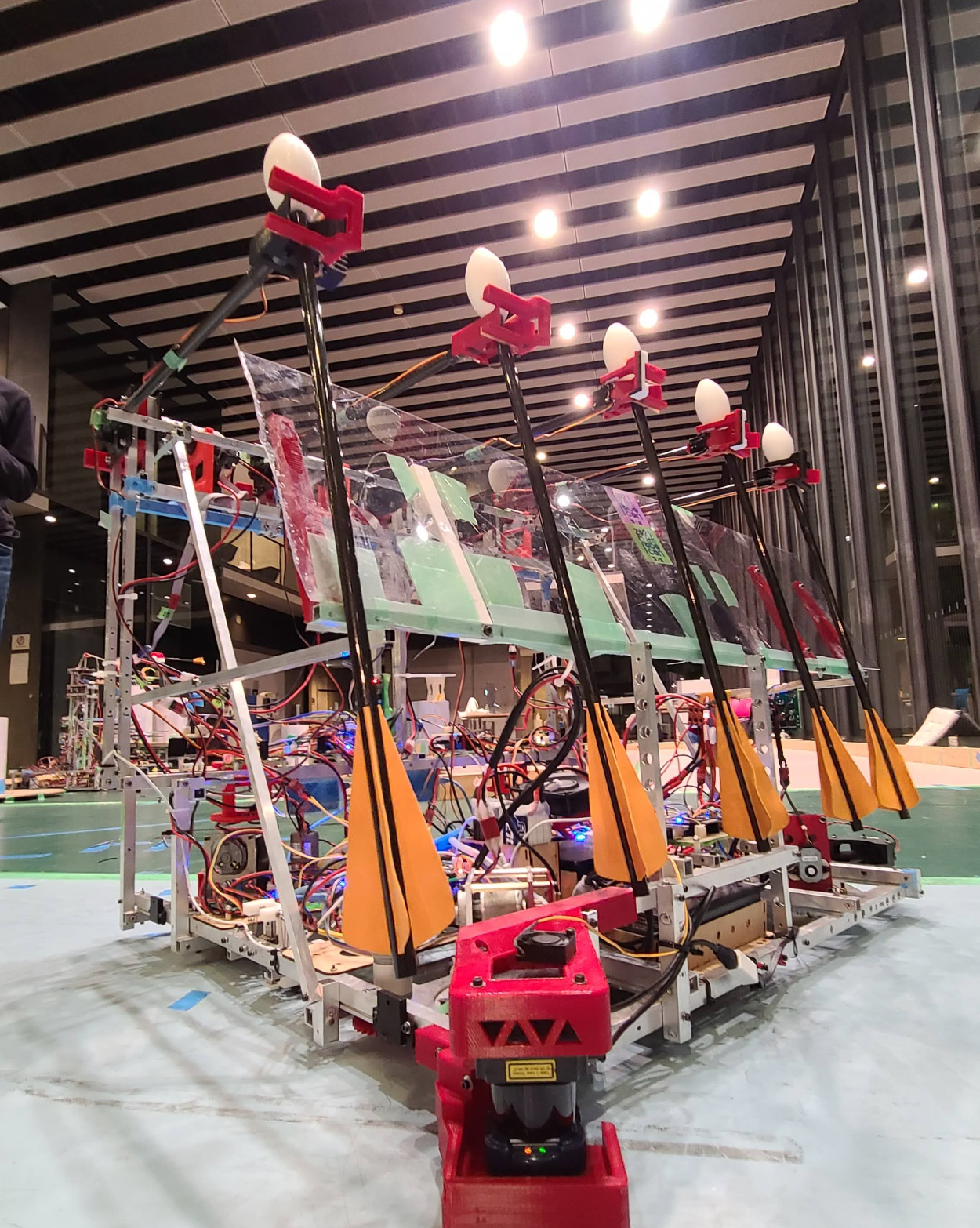
動画
フィールドメンバーとしてNHK学生ロボコンへ出場。1勝1敗。