

ROBOMECH 2023 / Humanoids 2023 (採択率63%)にて発表
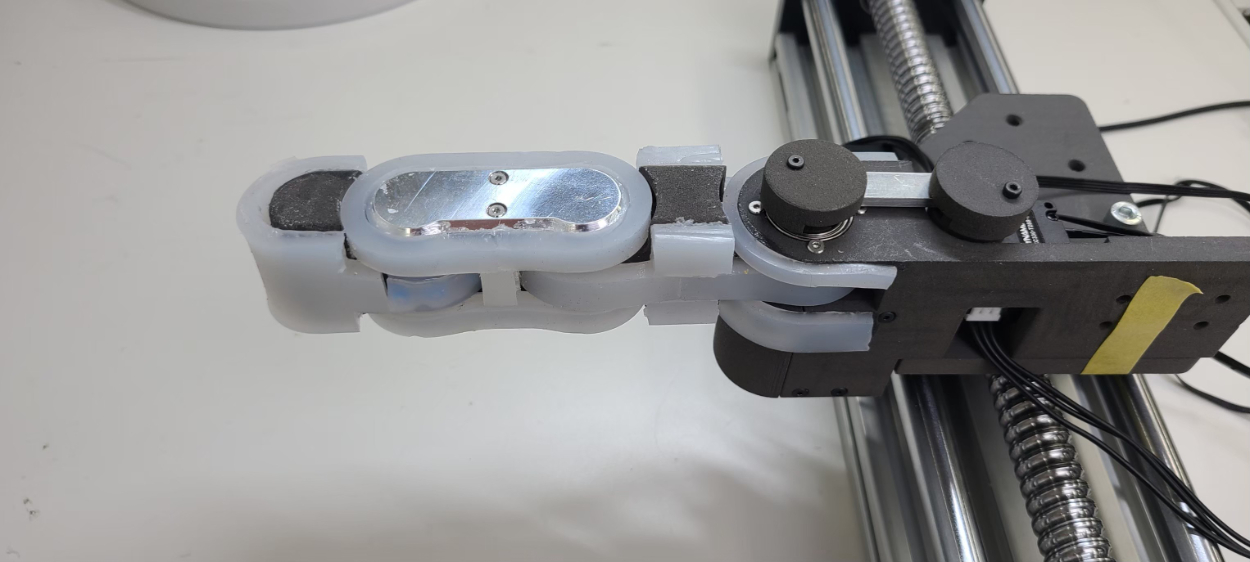
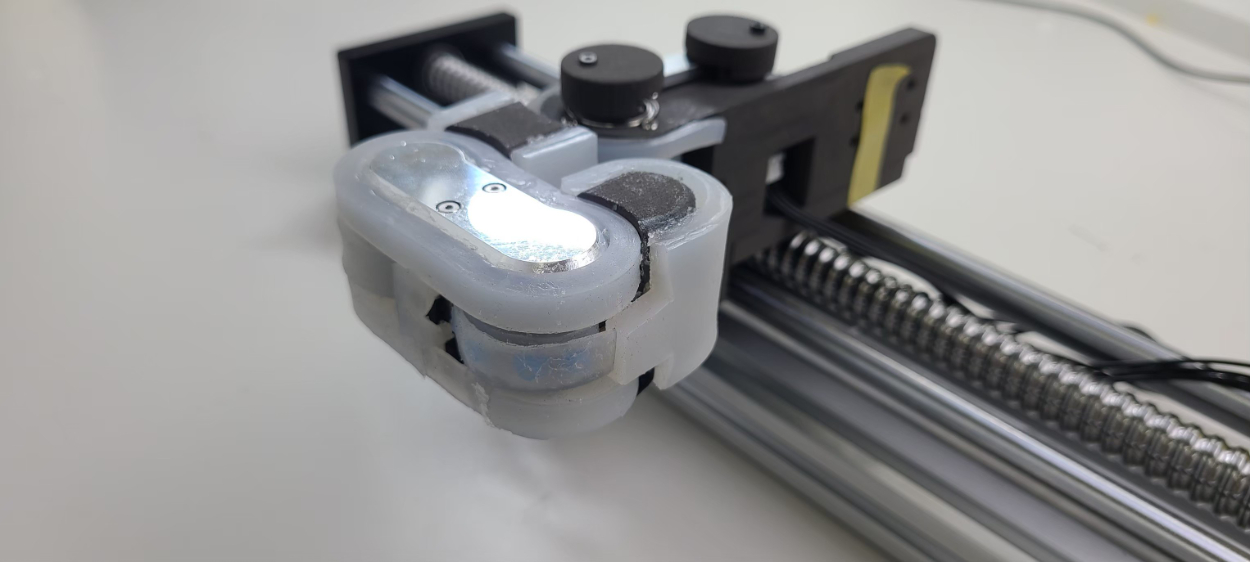
ヒューマノイドロボットのロボットハンドの表面全体を柔らかいスキンと3軸触覚センサで覆うための「Encircling Structure」を考案し、ロボットフィンガーとして製作した。
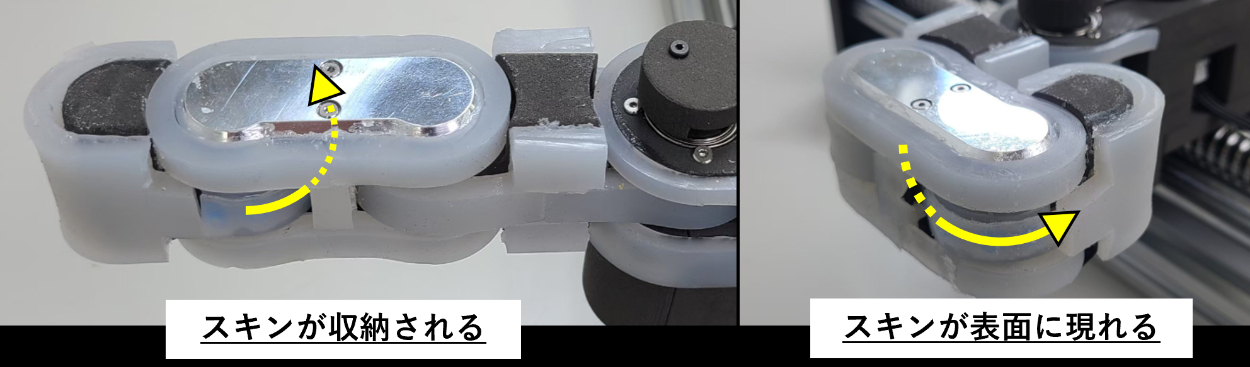
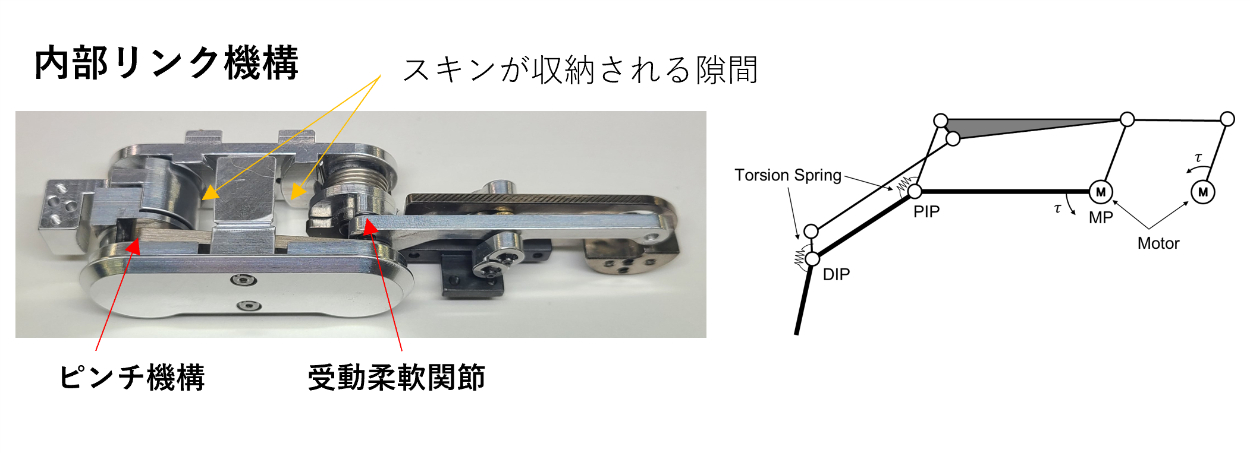
内部には2種類の受動柔軟機構を搭載した。
3軸触覚センサ(uSkin)搭載し、手のひら側と手の甲側の両面の触覚情報を使って、器用に把持対象物体を操れる。
ROBOMECH 2023 / Humanoids 2023 (採択率63%)にて発表
ヒューマノイドロボットのロボットハンドの表面全体を柔らかいスキンと3軸触覚センサで覆うための「Encircling Structure」を考案し、ロボットフィンガーとして製作した。
内部には2種類の受動柔軟機構を搭載した。
3軸触覚センサ(uSkin)搭載し、手のひら側と手の甲側の両面の触覚情報を使って、器用に把持対象物体を操れる。