

目的: 脚ロボットや協働ロボット用のアクチュエータモジュールの開発
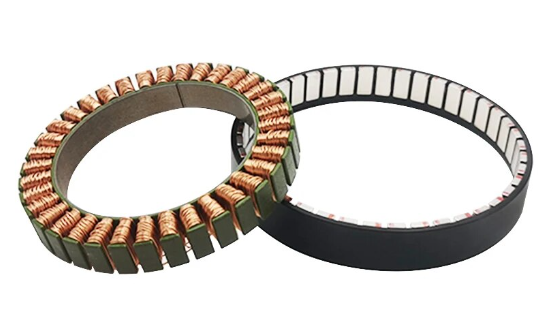
開発概要: 大径かつアウターローター型ブラシレスモーターのステータの中に低減速の遊星ギアボックス(内歯車と平歯車)を入れる。
参考: MIT Mini Cheetah など
① ブラシレスモーターの制御
位置制御 / 速度制御 / 力制御の実現
moteus(モータードライバーを使用)
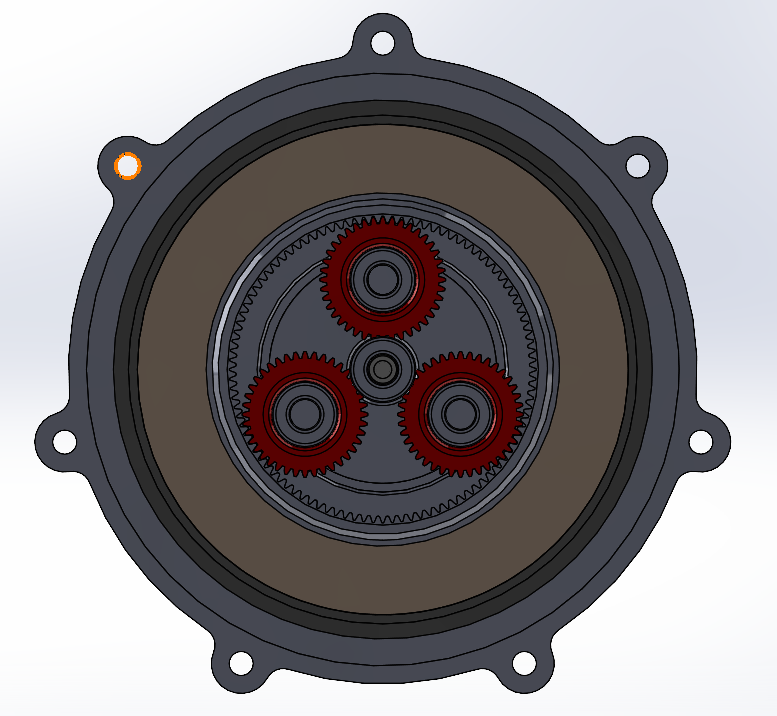
② 減速機ユニット(QDD)を製作(減速機はステータの中に入れていない)
10N/mを目標とし、7.5:1の遊星ギアボックスを製作した。(バックドライブする)

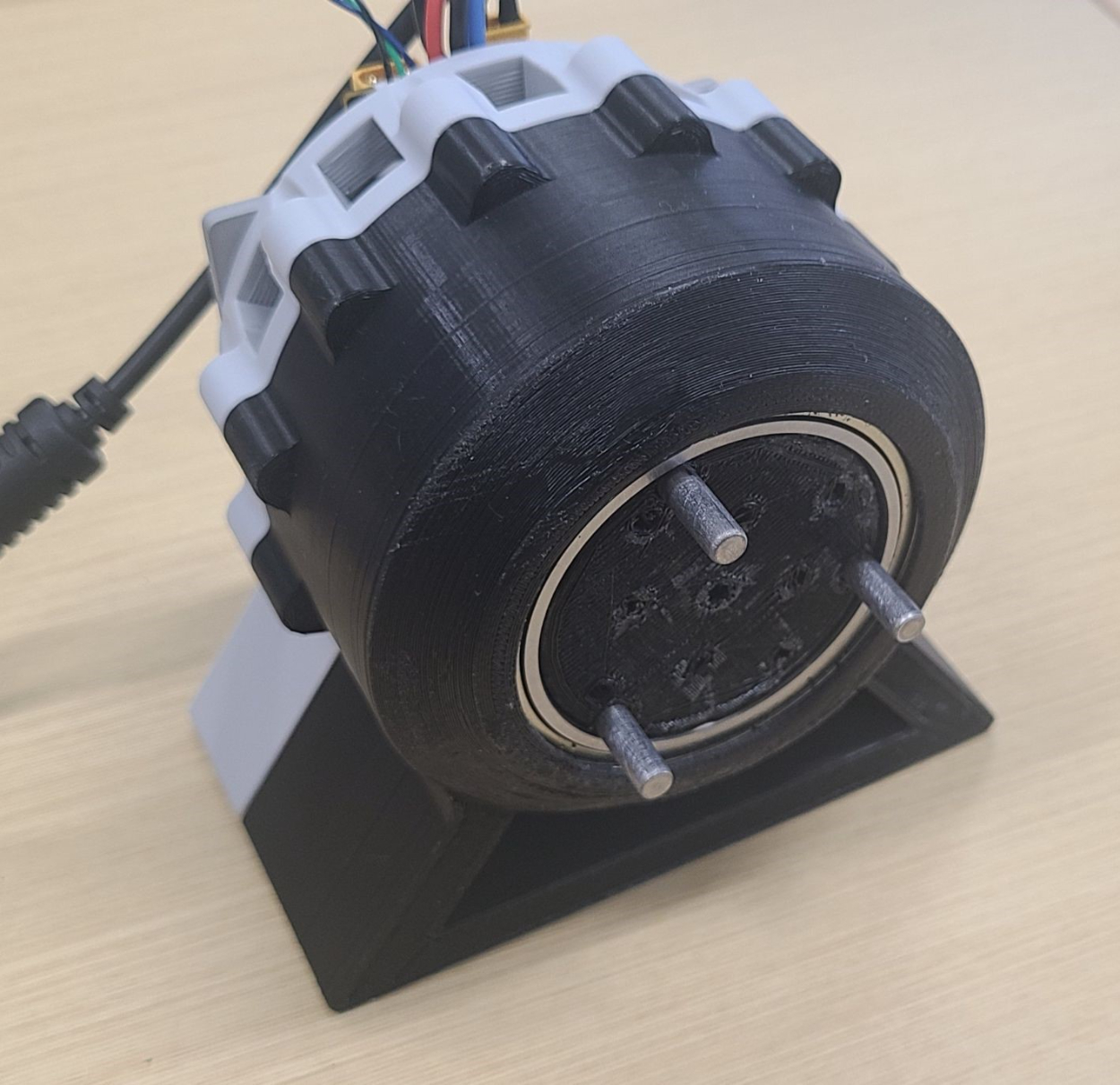
モーター非通電時にもバックドライブする
③ フレームレスモーターから小型QDDを製作中
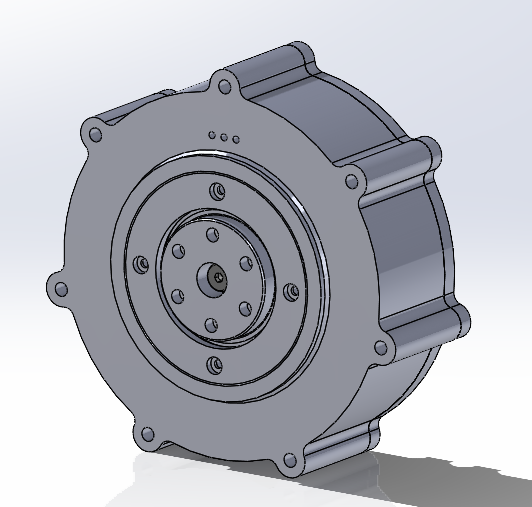
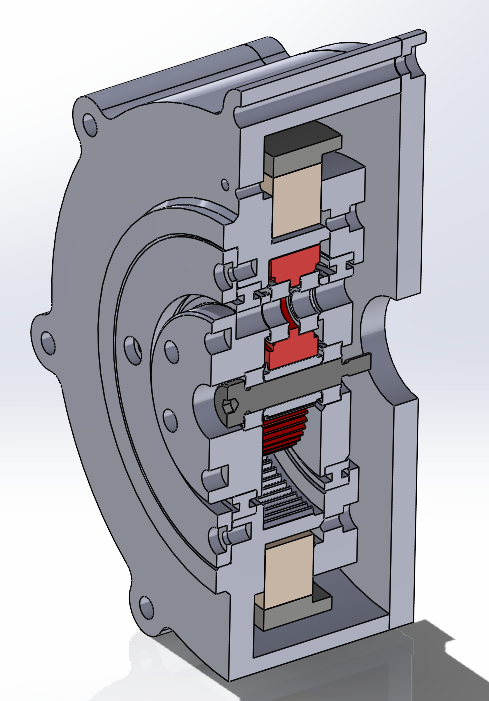

- ギア比 6:1
- ストールトルク 9.6N (ギア効率80%として)